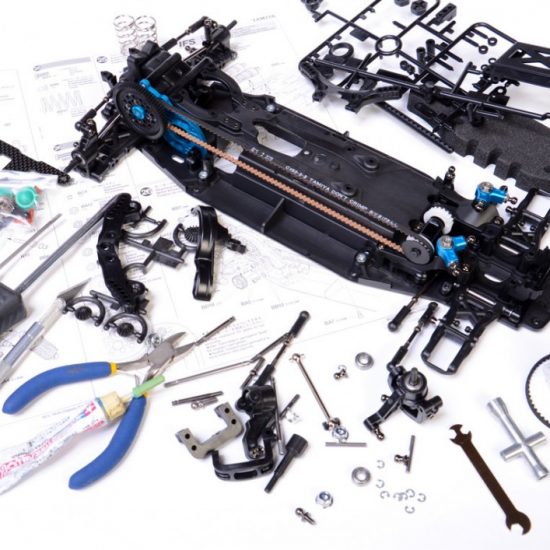
 קיבלנו לפני שבוע-שבועיים פנייה מחברה רב לאומית עם כמה מפעלים בישראל, לבוא ולראות איך ליישם את הסוייר באחד המפעלים שלה. מדובר במפעל עם כמה וכמה אזורי הרכבה, בהם מורכבים מוצרים שמשך ההרכבה שלהם נע בין מספר ימים למספר שבועות ליחידה. הסוייר אומנם נבנה במיוחד לייצור של סדרות בינוניות וקצרות, אבל גם כשאנחנו מדברים על סדרה קצרה, אנו רואים בדמיוננו פעולות רפטטטיבית שנמשכת מספר שעות למוצר, ומידי כמה שעות עוברים לפעילות מחזורית אחרת. רצפת הייצור קצת מזכירה את התמונה שבצד, והאמת שהיו לי ספקות רבים ביחס לישימות הסוייר לסביבה שכזו, אבל הזמינו אותי, אז באתי עם חיוך גדול והרבה קשב.
קיבלנו לפני שבוע-שבועיים פנייה מחברה רב לאומית עם כמה מפעלים בישראל, לבוא ולראות איך ליישם את הסוייר באחד המפעלים שלה. מדובר במפעל עם כמה וכמה אזורי הרכבה, בהם מורכבים מוצרים שמשך ההרכבה שלהם נע בין מספר ימים למספר שבועות ליחידה. הסוייר אומנם נבנה במיוחד לייצור של סדרות בינוניות וקצרות, אבל גם כשאנחנו מדברים על סדרה קצרה, אנו רואים בדמיוננו פעולות רפטטטיבית שנמשכת מספר שעות למוצר, ומידי כמה שעות עוברים לפעילות מחזורית אחרת. רצפת הייצור קצת מזכירה את התמונה שבצד, והאמת שהיו לי ספקות רבים ביחס לישימות הסוייר לסביבה שכזו, אבל הזמינו אותי, אז באתי עם חיוך גדול והרבה קשב.
אז אחרי שנלגם הקפה, גיא, שאירח אותי אמר: 'אני רוצה לאמן את סוייר להיות הסו-שף שלי'. סו-שף ??? מה למפעל הרכבה של אלקטרו מכאניקה ולבישול? כשראה שאני לא ממש מצליח לעקוב אחרי הלוגיקה שלו, הסביר – הסו-שף מגיש את הרכיבים והשף מכניס ומרכיב אותם לכדי מנה מהממת, בקצב הנכון, עם הכלים הנכונים, ועם בקרת איכות.
מניתוח עיסוקים ראשוני של צוותי ההרכבה במפעל, הם מעריכים ש:
- המרכיבים משקיעים בממוצע כשליש משרה שלהם בתהליך הקיוט,
- תהליך הקיוט (איסוף הפריטים ממגירות, ארגזים וממחסן לערכה להרכבה) ככל הנראה לא נעשה סדור בתחילת העבודה, אלא נעשה לשיעורין, מביאים חלקים, מרכיבים אותם, ומביאים עוד.
- חלק ניכר מזמן עבודת ההרכבה מושקע בלהושיט יד מגששת כדי לקחת את החלק הבא, ולעיתים, בעיקר בהרכבות שהן גדולות יחיסית, כל מספר חלקים, המרכיב ניגש אל השולחן לקחת את הכלים המתאימים ואת החלקים המתאימים לשלב הבא של ההרכבה.
אז איך זה מתחבר לסו-שף? הם רוצים שהסוייר (הסו-שף) יגיש למרכיב (השף) את החלקים ואת כלי העבודה. להסביר למה זה לא ילך – מאוד קל. גודל החלקים משתנה, צורתם משתנה, גריפר (כף ידו של הקובוט) שלוקח חלק גדול שונה מאוד מגריפר שמותאם לחלקים קטנים. ומה עם כלי עבודה? איך מגישים אותם? וכל פעם צריך ללמד את הסוייר סדר הרמה אחר של פריטים במגוון אחר… לא ידעתי איך לאכול את זה – אבל לא אומרים ללקוח שרוצה פתרון, אז אמרתי שנחשוב.
הקונספט עלה בעקבות ביקור שערכתי בחודש האחרון במספר חברות שמפתחות את הדור הבא של לוגיסטיקה קובוטית. טכנולוגיות שיחליפו את הקונספט היקר מדי והמסורבל מדי שנקרא מחסן אוטומטי, או בשמו האחר אצל רבים מאילו שרכשו מחסן אוטומטי – הפיל הלבן. הדור הבא של הלוגיסטיקה הקובוטית יהיה מבוסס על קובוטים שעובדים עם מלקטים – האדם מלקט לקובוט, והקובוט מתרוצץ ממלקט למלקט, ואל עמדות הניפוק על מנת לממש את ההזמנה. יש היום כמה קונספטים שמתפתחים בכיוון הזה, ובשנים הקרובות נתחיל לראות יישומים אפקטיביים של הטכנולוגיות האלו, כרגיל – בהתחלה בחו"ל אצל הלקוחות הגדולים ו3-5 שנים מאוחר יותר נתחיל לראות יישומים כאלו גם בשוק המקומי.
 אז הנה הקונספט – ליקוט ראשוני וסידור לתוך מערך מוגדר מראש של מיכלי הגשה ונקודות הנחה של כלי עבודה. ושימוש בקובוט כמגיש. דגשים:
אז הנה הקונספט – ליקוט ראשוני וסידור לתוך מערך מוגדר מראש של מיכלי הגשה ונקודות הנחה של כלי עבודה. ושימוש בקובוט כמגיש. דגשים:
- לסדר את המיכלים לפי סדר הפעולות המוגדר בפקודת העבודה ובכמויות הפריטים המוגדרות בפקודת העבודה, כך שהמרכיב יקבל את החלקים בכמות ובדיוק לפי הסדר שהוגדר.
- אפשר להגדיר על פי האזור ממנו נלקח הפריט, שבמקרים מסויימים על ההסוייר להמתין שהמשתמש יקח את החלקים מהמיכל ויחזיר אותו למקום, ובמקרים אחרים הוא יבין שעליו לפתוח את אצבעותיו ולמסור את כלי העבודה לידו של המפעיל.
- את התקשורת עם הסוייר אפשר לממש ללא שום צורך בשלט רחוק או בכפתורים, אלא פשוט בעזרת תחושת המגע של הסוייר. אם המשתמש נותן דחיפה קלה לידו של הסוייר – הסוייר יכול להבין זאת כפקודה.
- אם רוצים לתת מגוון של פקודות, אפשר להגדיר את כיוון הדחיפה כפקודה – דחיפה קלה מעלה – הבא את הפריט הבא, דחיפה קלה מטה – הבא מברג, דחיפה קלה ימינה, הבא מקדחה, ודחיפה קלה שמאלה, קח את הכלי שאני מגיש לך והחזר אותו למקום.
- בואו נלך עוד צעד אחד הלאה:
- בהנחה שיש מספר כלי עבודה, אין הכרח לסדר אותם בתצורה קבועה, צריך פשוט לפזר אותם על פני המשטח. פעם אחת נלמד את הסוייר איך נראה כל כלי, והיכן לאחוז בו ברגע שהוא מזוהה. ואז ברגע שהמרכיב יתן דחיפה קלה למטה לזרוע, היא תפנה לאזור הכלים, תרחף מעליו ועם המצלמה האינטגרלית תזהה את כלי העבודה, ותרים אותו בצורה נכונה.
- ואם כבר התחלנו להשתולל עם מערכת הראייה של הסוייר, אז כשמחזירים חלק, אפשר להגדיר לו שיסתכל על השולחן לפני שהוא מניח, ושיניח באזור פנוי.